Principles of map visualization (cartography):
Map design: The process of creating maps that effectively communicate spatial information.
Map types: Different types of maps, such as density, choropleth, and dot density maps.
Map interactivity: The ability to interact with maps through zooming, panning, and clicking on features.
Map elements: The components of a map, including title, legend, scale, and north arrow.
Map projections: The methods used to represent the curved surface of the Earth on a flat map.
# Import the required libraries
import pandas as pd
import numpy as np
import geopandas as gpd
import seaborn as sns
sns.set_theme(style="ticks")
import matplotlib.pyplot as plt
import warnings
warnings.filterwarnings("ignore")
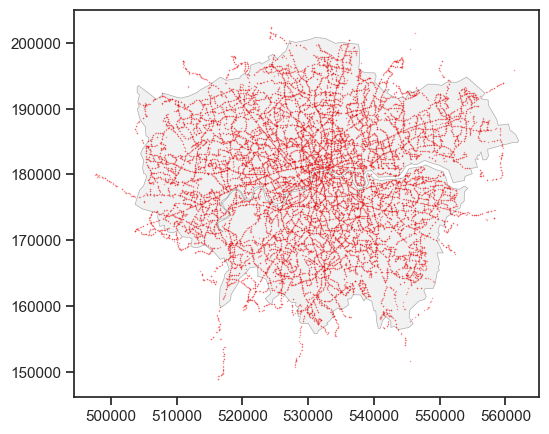
A dot map can be used to visualize the distribution of the point data. The dot map can directly show the density of the locations for a large number of points.
# Read the TfL Bus Stop Locations data
df_bus_stop = pd.read_csv("data/tfl_bus-stops.csv")
# Convert the DataFrame to a GeoDataFrame
gdf_bus_stop = gpd.GeoDataFrame(df_bus_stop, geometry=gpd.points_from_xy(df_bus_stop['Location_Easting'], df_bus_stop['Location_Northing']))
# We also need the London boundary (we create this boundary by dissolve function in last week) to add the background of the map.
gdf_london_boundary = gpd.read_file("data/whole_london_boundary.geojson")
# transfer the coordinate system of the London boundary to OSGB36
gdf_london_boundary = gdf_london_boundary.to_crs("EPSG:27700")
# Plot the bus stops and London boundary on a map
# Create a figure and axis
fig, ax = plt.subplots(figsize=(6, 6))
# Plot the London boundary
gdf_london_boundary.plot(ax=ax, # ax is the axis to plot on
color='lightgrey', # color of the polygon
edgecolor='black', # color of the boundary
alpha=0.3, # transparency of all colors
linewidth=0.5) # linewidth of the polygon boundary
# The bus stop points plot
gdf_bus_stop.plot(ax=ax, # another layer of points but put in the same axis
color='red', # color of the points
edgecolor='grey', # color of the point boundary
linewidth=0.05, # linewidth of the point boundary
markersize=1, # size of the points
alpha=0.4, # transparency of the all colors
label='TfL Bus Stops', # label of the points
)
# We need the matplotlib_map_utils to add the scale bar and north arrow on the map
from matplotlib_map_utils.core.north_arrow import NorthArrow, north_arrow
from matplotlib_map_utils.core.scale_bar import ScaleBar, scale_bar
NorthArrow.set_size("small")
ScaleBar.set_size("small")
# Add the North Arrow and scale bar to the map
north_arrow(ax, location="upper right", rotation={"crs": gdf_bus_stop.crs, "reference": "center"})
scale_bar(ax, location="upper left", style="boxes", bar={"projection": gdf_bus_stop.crs})
# Set the title
ax.set_title('TfL Bus Stops in London')
# Set the legend
ax.legend(labels=['Bus Stops Locations'], loc='lower left', fontsize=8)
ax.set_xlabel('Easting (m)')
ax.set_ylabel('Northing (m)')
# We can save the figure as a jpg file
# plt.savefig("tfl_bus_stops.jpg", dpi=300, bbox_inches='tight')
plt.show()
---------------------------------------------------------------------------
ValueError Traceback (most recent call last)
Cell In[5], line 25
23 ScaleBar.set_size("small")
24 # Add the North Arrow and scale bar to the map
---> 25 north_arrow(ax, location="upper right", rotation={"crs": gdf_bus_stop.crs, "reference": "center"})
26 scale_bar(ax, location="upper left", style="boxes", bar={"projection": gdf_bus_stop.crs})
27 # Set the title
File ~/PycharmProjects/MSc_AI_DS_Research_Projects/.venv/lib/python3.11/site-packages/matplotlib_map_utils/core/north_arrow.py:287, in north_arrow(ax, draw, location, scale, base, fancy, label, shadow, pack, aob, rotation)
285 _pack = naf._validate_dict(pack, _DEFAULT_PACK, nat._VALIDATE_PACK, return_clean=True)
286 _aob = naf._validate_dict(aob, _DEFAULT_AOB, nat._VALIDATE_AOB, return_clean=True)
--> 287 _rotation = naf._validate_dict(rotation, _DEFAULT_ROTATION, nat._VALIDATE_ROTATION, return_clean=True)
289 # First, getting the figure for our axes
290 fig = ax.get_figure()
File ~/PycharmProjects/MSc_AI_DS_Research_Projects/.venv/lib/python3.11/site-packages/matplotlib_map_utils/validation/functions.py:243, in _validate_dict(input_dict, default_dict, functions, to_validate, return_clean, parse_false)
241 # NOTE: This is messy but the only way to get the rotation value to the crs function
242 if key=="crs":
--> 243 _ = func(prop=key, val=val, rotation_dict=values, **fd["kwargs"])
244 # NOTE: This is messy but the only way to check the projection dict without keywords
245 elif key=="projection":
File ~/PycharmProjects/MSc_AI_DS_Research_Projects/.venv/lib/python3.11/site-packages/matplotlib_map_utils/validation/functions.py:101, in _validate_crs(prop, val, rotation_dict, none_ok)
99 if reference == "center":
100 if crs is None:
--> 101 raise ValueError(f"If degrees is set to None, and reference is 'center', then a valid crs must be supplied")
102 else:
103 if crs is None or reference is None or coords is None:
ValueError: If degrees is set to None, and reference is 'center', then a valid crs must be supplied
Tailoring the dot map
We can tailor the dot map by changing the size of the dots, the color of the dots, and the transparency of the dots according to different attributes of the data (e.g., categorical data and numerical data).
Different colors represent different categories of the data (e.g., different types of transport).
Different sizes represent different values of the data (e.g., population size).
# Read the TfL Underground station geo-data
gdf_underground = gpd.read_file("data/Underground_Stations.geojson")
# transfer the coordinate system of the Underground stations to OSGB36
gdf_underground = gdf_underground.to_crs("EPSG:27700")
gdf_underground
| OBJECTID | NAME | LINES | ATCOCODE | MODES | ACCESSIBILITY | NIGHT_TUBE | NETWORK | DATASET_LAST_UPDATED | FULL_NAME | geometry | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 111 | St. Paul's | Central | 940GZZLUSPU | bus, tube | Not Accessible | Yes | London Underground | 2021-11-29 00:00:00+00:00 | St. Paul's station | POINT Z (532110.145 181274.419 0) |
| 1 | 112 | Mile End | District, Hammersmith & City, Central | 940GZZLUMED | bus, tube | Partially Accessible - Interchange Only | Yes | London Underground | 2021-11-29 00:00:00+00:00 | Mile End station | POINT Z (536502.678 182534.693 0) |
| 2 | 113 | Bethnal Green | Central | 940GZZLUBLG | bus, tube | Not Accessible | Yes | London Underground | 2021-11-29 00:00:00+00:00 | Bethnal Green station | POINT Z (535045.414 182718.596 0) |
| 3 | 114 | Leyton | Central | 940GZZLULYN | bus, tube | Not Accessible | Yes | London Underground | 2021-11-29 00:00:00+00:00 | Leyton station | POINT Z (538369.354 186076.113 0) |
| 4 | 115 | Snaresbrook | Central | 940GZZLUSNB | bus, tube | Not Accessible | Yes | London Underground | 2021-11-29 00:00:00+00:00 | Snaresbrook station | POINT Z (540158.622 188804.247 0) |
| ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... |
| 268 | 483 | Seven Sisters | Victoria | 940GZZLUSVS | tube | Not Accessible | Yes | London Underground | 2021-11-29 00:00:00+00:00 | Seven Sisters station | POINT Z (533644.648 188931.178 0) |
| 269 | 484 | Theydon Bois | Central | 940GZZLUTHB | tube | Partially Accessible | No | London Underground | 2021-11-29 00:00:00+00:00 | Theydon Bois station | POINT Z (545543.329 199101.251 0) |
| 270 | 485 | Kenton | Bakerloo | 940GZZLUKEN | tube | Not Accessible | No | London Underground | 2021-11-29 00:00:00+00:00 | Kenton station | POINT Z (516729.561 188314.716 0) |
| 271 | 486 | Woodside Park | Northern | 940GZZLUWOP | tube, bus | Fully Accessible | No | London Underground | 2021-11-29 00:00:00+00:00 | Woodside Park station | POINT Z (525720.193 192588.5 0) |
| 272 | 487 | Preston Road | Metropolitan | 940GZZLUPRD | tube, bus | Not Accessible | No | London Underground | 2021-11-29 00:00:00+00:00 | Preston Road station | POINT Z (518250.918 187282.096 0) |
273 rows × 11 columns
We will add usage information (counted by entry/exit) of London Underground stations to build a dot map. The usage data was published by TfL in the London Underground Station Crowding page. The usage data is in the CSV or XLSX format, and we can read it using the Pandas library.
# we only need the London Underground stations and annualised usage, so we need to filter the data.
df_usage_lu = df_usage[df_usage['Unnamed: 0'] == 'LU'][['Unnamed: 3', 'Annualised']].rename(columns={'Unnamed: 3': 'name', 'Annualised': 'usage'})
df_usage_lu.head()
| name | usage | |
|---|---|---|
| 1 | Acton Town | 4823835 |
| 2 | Aldgate | 6897314 |
| 3 | Aldgate East | 10947896 |
| 4 | Alperton | 2598605 |
| 5 | Amersham | 1729521 |
# Note that the usage columns have some missing values and some values are string '---' which means no data.
# You can use more codes to fill the data as NaN occurs as the mismatch of the name between the two datasets, though some cases are indicating one station.
print(gdf_underground_usage.usage.values)
[9189088 11145822 nan 8592536 1849887 6955728 1948236 4051381 3371643
1167037 885823 4492296 267679 332284 nan 4383503 8491273 10787392 806675
1503305 3937018 1212120 2153159 1860607 6314434 3063800 1597432 6030683
6258859 1631696 1555062 1663555 1654538 2598605 4159381 13568222 27379635
12573815 7822836 5106522 2203557 3293586 3947509 1450247 2307306 5962575
7049636 nan 4377539 nan 14965619 6897314 nan 23330204 5185508 40070382
72124262 11239346 21207073 nan nan 3644937 9413060 11353518 26088906
2074444 1841679 5785361 3763523 5568858 7890670 nan 2624208 2899358 nan
nan 7087668 nan 14076462 2645552 2542830 1623305 838918 3216718 1804676
1952034 5748997 2138577 15779710 4373423 12110869 3172252 8590075
37424555 1722368 3269238 5652447 5008989 nan 51106043 20240977 7803444
9576731 6802053 nan 23172392 12328817 5573360 nan 5236551 7045026 5339416
7137484 12397420 6265211 6323510 8040059 5210928 5113576 58726155 3889479
2967011 4532637 '---' 4875982 5615724 4633070 3130908 1604937 1455300
4909025 14142708 8975412 nan 6151983 1786001 2752421 2861021 397280
1841035 3276268 2005688 3043893 3466311 3061427 820575 3540050 2385943
17051267 2042489 1817060 2466317 4598994 1296040 nan 3937317 4045767
26739879 nan nan 2689160 nan 2681574 2617813 nan 2297814 13156281 2717311
nan 5022937 9088053 4266560 19172572 '---' nan nan 4774045 5338957
13349683 15429088 4823835 1954910 28247401 20479785 7381051 8263631 nan
2852360 2776023 3000487 3370726 1675267 2782422 5240900 6823150 5181211
2134593 4663306 10947896 17452196 4157626 15510977 2565708 1989399 nan
1057631 54376225 5419509 1373730 853803 1463521 1396078 1408690 1003523
3340365 1398638 2223811 8435460 3353641 3002979 2073359 5870213 8508705
nan 11223888 1296777 8399835 4108613 4040066 605628 4354076 nan 5347065
4731235 4827763 nan 3529781 2547324 4780369 3727656 8875310 3019402
9534074 7948900 15137045 3609039 1435853 5133701 3259745 2158123 1729521
5426495 nan 18805872 nan 4321012 5198096 4408040 966889 1851241 808774
2162088 837496 1653584 4067823 15846905 12258814 5179915 12165434 734300
1515511 3657219 2423452]
# Plot the Underground stations with usage data
# Create a figure and axis
fig, ax = plt.subplots(figsize=(8, 8))
# Plot the London boundary
gdf_london_boundary.plot(ax=ax, # ax is the axis to plot on
color='lightgrey', # color of the polygon
edgecolor='black', # color of the boundary
alpha=0.2, # transparency of all colors
linewidth=0.5) # linewidth of the polygon boundary
# The Underground stations plot
gdf_underground_usage_s.plot(ax=ax,
column='usage', # column name to tailor the dot map, here is the numerical data
cmap='viridis', # color map
markersize=40, # size of the points
alpha=0.7, # transparency of the all colors
edgecolor='black', # color of the point boundary
linewidth=0.5, # linewidth of the point boundary
legend=True,
legend_kwds={ "label": "Annualised Usage",
"orientation": "horizontal"
},
)
# Add the North Arrow and scale bar to the map
north_arrow(ax, location="upper right", rotation={"crs": gdf_underground.crs, "reference": "center"})
scale_bar(ax, location="lower left", style="boxes", bar={"projection": gdf_underground.crs})
# Set the title
ax.set_title('Annualised Usage of TfL Underground Stations in London')
ax.set_xlabel('Easting (m)')
ax.set_ylabel('Northing (m)')
plt.show()
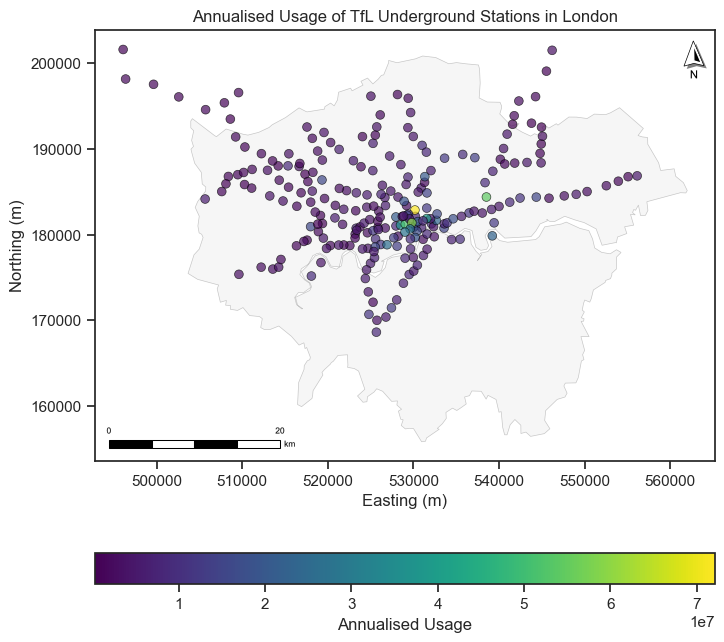
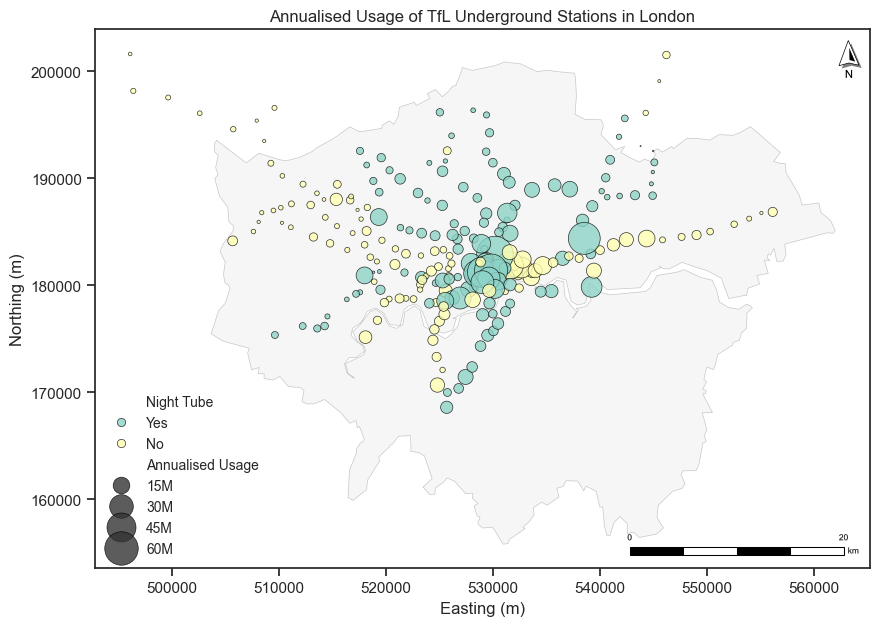
A proportional map is a variation of a dot map, where the size of the dots is proportional to the value of the variable being represented.
# Plot the Underground stations with usage data
# Create a figure and axis
fig, ax = plt.subplots(figsize=(10, 10))
# Plot the London boundary
gdf_london_boundary.plot(ax=ax, # ax is the axis to plot on
color='lightgrey', # color of the polygon
edgecolor='black', # color of the boundary
alpha=0.2, # transparency of all colors
linewidth=0.5) # linewidth of the polygon boundary
# We use the seaborn to plot the Underground stations
sns.scatterplot(ax=ax,
data=gdf_underground_usage_s,
x=gdf_underground_usage_s.geometry.x, # x coordinate
y=gdf_underground_usage_s.geometry.y, # y coordinate
hue='NIGHT_TUBE', # column name to tailor the dot map, here is the categorical data
size=gdf_underground_usage_s['usage'], # size of the points
sizes=(0, 700), # size range of the point selection
alpha=0.8, # transparency of the all colors
palette='Set3', # color map
linewidth=0.5, # linewidth of the point boundary
edgecolor='black', # color of the point boundary
legend=True,
)
# Add the North Arrow and scale bar to the map
north_arrow(ax, location="upper right", rotation={"crs": gdf_london_boundary.crs, "reference": "center"})
scale_bar(ax, location="lower right", style="boxes", bar={"projection": gdf_london_boundary.crs})
# Set the legend
handles, labels = ax.get_legend_handles_labels()
ax.legend(handles=handles,
labels=['Night Tube', 'Yes', 'No', 'Annualised Usage', '15M', '30M', '45M', '60M'],
loc='lower left', fontsize=10, title_fontsize=12, frameon=False)
# Set the title
ax.set_title('Annualised Usage of TfL Underground Stations in London')
ax.set_xlabel('Easting (m)')
ax.set_ylabel('Northing (m)')
plt.show()
A choropleth map is a type of thematic map where areas are shaded or patterned in proportion to the value of a variable being represented. It is used to visualize the spatial distribution of a variable across different regions (Polygons).
# Read the UK LAs data
gdf_las = gpd.read_file("data/Local_Authority_Districts_December_2024_Boundaries_UK_BSC.geojson")
# Convert the coordinate reference system (CRS) to OSGB
gdf_las = gdf_las.to_crs("EPSG:27700")
gdf_las['area'] = gdf_las.geometry.area / 1e6 # convert the area to km2
# Read the 2022 population data
df_pop = pd.read_csv("data/populaiton_2022_all_ages_uk.csv")
# merge the population data with the gdf_las data
gdf_las_pop = pd.merge(gdf_las, df_pop, left_on='LAD24CD', right_on='Code', how='left')
gdf_las_pop = gdf_las_pop.rename(columns={'All ages': 'population'})
# calculate the population density
gdf_las_pop['density'] = gdf_las_pop['population'] / gdf_las_pop['area'] # calculate the population density
We have used a sequential color to plot the population distribution across the UK LAs. The darker the color, the higher the population. Alternatively, we can change the legend which means we can use the categorical data to plot the choropleth map. For example, we can classify the population density to several levels and plot the choropleth map by using setting scheme and k in the plot().
import contextily as cx
Interactive maps are maps that allow users to interact with the map by zooming, panning, and clicking on features. They are used to visualize geospatial data in a more dynamic way. There are several libraries in Python that can be used to create interactive maps, such as Folium, Plotly, and Bokeh. You can find an interactive map of uk LA population density generated from the Folium at here (click).
import libpysal
import spreg
# ensure the spreg pkg is at least the 1.8.2 version
print(spreg.__version__)
1.8.3
A spatial weight matrix (spatial adjacency matrix) \(W\) is a square matrix that quantifies the spatial relationship between each pair of locations (i and j are the spatial unit index) across \(n\) spatial units: $$ W =
W =
$$
pysallibrary community consist lots of pkgs in spatial analysis, likespreg,esda,libpysalandmgwr.
gdf_nyc.crs
<Geographic 2D CRS: EPSG:4326>
Name: WGS 84
Axis Info [ellipsoidal]:
- Lat[north]: Geodetic latitude (degree)
- Lon[east]: Geodetic longitude (degree)
Area of Use:
- name: World.
- bounds: (-180.0, -90.0, 180.0, 90.0)
Datum: World Geodetic System 1984 ensemble
- Ellipsoid: WGS 84
- Prime Meridian: Greenwich
import libpysal.weights as weights
df_wq = w_q.to_adjlist(drop_islands=True)
df_wq
| focal | neighbor | weight | |
|---|---|---|---|
| 0 | 0 | 17 | 1.0 |
| 1 | 0 | 31 | 1.0 |
| 2 | 0 | 77 | 1.0 |
| 3 | 0 | 155 | 1.0 |
| 4 | 1 | 17 | 1.0 |
| ... | ... | ... | ... |
| 1085 | 194 | 22 | 1.0 |
| 1086 | 194 | 38 | 1.0 |
| 1087 | 194 | 79 | 1.0 |
| 1088 | 194 | 94 | 1.0 |
| 1089 | 194 | 139 | 1.0 |
1090 rows × 3 columns
More usages can be found at The libysal function page
Global spatial autocorrelation:
Global spatial autocorrelation answers the question: Is there overall clustering across the whole map?
Moran’s I (Moran, 1950) is a measure of global spatial autocorrelation. It is a single value that summarizes the degree of spatial autocorrelation in the entire dataset: $\( I = \frac{n}{W} \cdot \frac{\sum_i \sum_j w_{ij} (x_i - \bar{x})(x_j - \bar{x})}{\sum_i (x_i - \bar{x})^2} \)$
Where:
\( n \): Number of spatial units
\( x_i \): Value at location \( i \)
\( \bar{x} \): Mean of the variable
\( w_{ij} \): Spatial weight between location \( i \) and \( j \)
\( W = \sum_i \sum_j w_{ij} \): Sum of all spatial weights
\(I > 0\): Positive spatial autocorrelation.
\(I < 0\): Negative spatial autocorrelation.
\(I = 0\): No spatial autocorrelation.
# compute the global Moran's I for total population
import esda
gdf_nyc['poptot'] = gdf_nyc['poptot'].astype(int)
mi = esda.Moran(gdf_nyc['poptot'], w_q, two_tailed=True)
Local spatial autocorrelation:
Local spatial autocorrelation answers the questions: Is there clustering in a specific area? Which specific areas are clustered or are spatial outlier?
Local indicators of spatial association (LISA):
is a statistical technique that decomposes global spatial autocorrelation measures into location-specific contributions. It identifies significant spatial clusters or spatial outliers by measuring the correlation between a location and its neighbors.
Local Moran’s I:
Local Moran’s I is a measure of local spatial autocorrelation. It is a value for each spatial unit that summarizes the degree of spatial autocorrelation in the local neighborhood of that unit: $\( I_i = \frac{(x_i - \bar{x})}{S^2} \cdot \sum_j w_{ij} (x_j - \bar{x}) \)$
Where:
\( I_i \): Local Moran’s I for location \( i \)
\( x_i \): Value at location \( i \)
\( \bar{x} \): Mean of the variable
\( S\): Standard deviation of the variable
\( S^2 \): Variance of the variable
\( w_{ij} \): Spatial weight between location \( i \) and \( j \)
\( j \): Neighbors of location \( i \)
\( \sum_j w_{ij} \): Sum of the spatial weights for location \( i \)
\( I_i > 0 \): Positive spatial autocorrelation (high values surrounded by high values or low values surrounded by low values)
\(I_i < 0 \): Negative spatial autocorrelation (high values surrounded by low values or low values surrounded by high values)
\(I_i = 0 \): No spatial autocorrelation You can find etails about the Local Moran’s I in the libpysal Local Moran I documentation.
Getis-Ord Gi*:
Gi* is a measure of local spatial autocorrelation that identifies clusters of high or low values. It is similar to Local Moran’s I, but it is more sensitive to the presence of outliers. It is used to identify hot spots (high values) and cold spots (low values) in the data: $\( G_i^* = \frac{\sum_j w_{ij} (x_j - \bar{x})}{\sqrt{\frac{S^2}{n}}} \)$ Where:
\( G_i^* \): Getis-Ord Gi* for location \( i \);
\( x_i \): Value at location \( i \);
\( \bar{x} \): Mean of the variable;
\( S^2 \): Variance of the variable;
\( n \): Number of spatial units;
\( w_{ij} \): Spatial weight between location \( i \) and \( j \);
\( j \): Neighbors of location \( i \);
\( \sum_j w_{ij} \): Sum of the spatial weights for location \( i \);
\( \sqrt{\frac{S^2}{n}} \): Standard deviation of the variable;
\( \sum_j w_{ij} \): Sum of the spatial weights for location \( i \);
\( \sqrt{\frac{S^2}{n}} \): Standard deviation of the variable;
\( \sum_j w_{ij} \): Sum of the spatial weights for location \( i \).
Z-scores: standardized G statistics that follow a normal distribution under spatial randomness.
P values: P-values from randomization/permutation.
You can use any strategies to plot the gi resluts, here we can plot the results to the map with three parts:
Hotspots: High positive Z-score (>0) with p-value < 0.05.
Coldspots: High negative Z-score (<0) with p-value < 0.05.
We usually use blank color to draw the ‘Not Significant cluster’ (p_value \(\geq\) 0.05).
2.2.3 Spatial lags#
# we can use the libpysal to compute the spatial lag
import libpysal as lps
ylag = lps.weights.lag_spatial(w_q, gdf_nyc['poptot'])
print(ylag)
[49362.25 28475. 47006.375 51427.75
33904.33333333 29394. 16276.33333333 30615.83333333
24442.6 26460.66666667 36855.4 35909.16666667
16313.5 25859.66666667 32423. 24938.33333333
35500. 51096.18518519 38548.04166667 27779.4
42008.25 48425.66666667 40841.52631579 32608.25
29787. 47603.33333333 29392.6 89058.
39918.5 0. 43581.375 56055.6
21846.75 32732.5 48332.8 27345.
26674.83333333 33253.75 41449. 29378.5
41864.14285714 33103. 22970.6 46351.
49333.8 30433.11111111 31618.75 40978.16666667
49566.2 17969. 21665. 46341.33333333
57367.76470588 27424.44444444 26972.33333333 37355.22222222
47931.6 39146.5 53198. 70978.375
32600.4 38980.25 28301.42857143 30198.
36467.5 56681.25 32198. 32485.4
73155.2 66668.66666667 29724.57142857 46159.
25791.5 34756.875 57186.6 28039.28571429
33982.42857143 45772.66666667 57685. 35781.75
45147.6 33185.33333333 60449. 26227.25
58117.6 52577.33333333 56311.6 56218.
23641.33333333 31126.4 42913.33333333 39061.6
23819. 39723.33333333 54064.66666667 35346.4
56398.8 24372. 39252.8 58900.2
44591.875 22039.25 46541. 35084.4
37563.5 35568.57142857 31351.5 24651.75
55706. 61634.33333333 35926. 33531.28571429
38671.33333333 43120.66666667 32351.16666667 42640.125
38910.375 52090. 34730. 46812.
37278.6 48268. 29281.5 29394.
42948.16666667 46641. 41365. 27143.
51776.4 56350.66666667 24468.16666667 24628.
26826. 49325. 32260.5 42973.6
68325.75 44167.28571429 32440. 53287.6
26728.5 36147.57142857 44762.5 37229.8
32338. 29262.2 28446. 30908.
54011.25 55331.5 55481.4 53901.
58571. 47130.66666667 31085.5 62864.85714286
32366.5 26322.66666667 75716. 32316.5
38722.4 15612.5 37183.4 37630.
39275.85714286 43798.66666667 62967.16666667 41816.66666667
36007.8 40267. 45930.3 52549.6
48399.4 49492. 49030.4 46985.85714286
44372. 26605.75 28592.14285714 26234.83333333
22638. 29548.42857143 23352. 29178.
65779.42857143 62009.6 47940.4 24141.5
27331.4 32973.875 48749. 53538.2
44769.71428571 52693.2 33380.33333333]
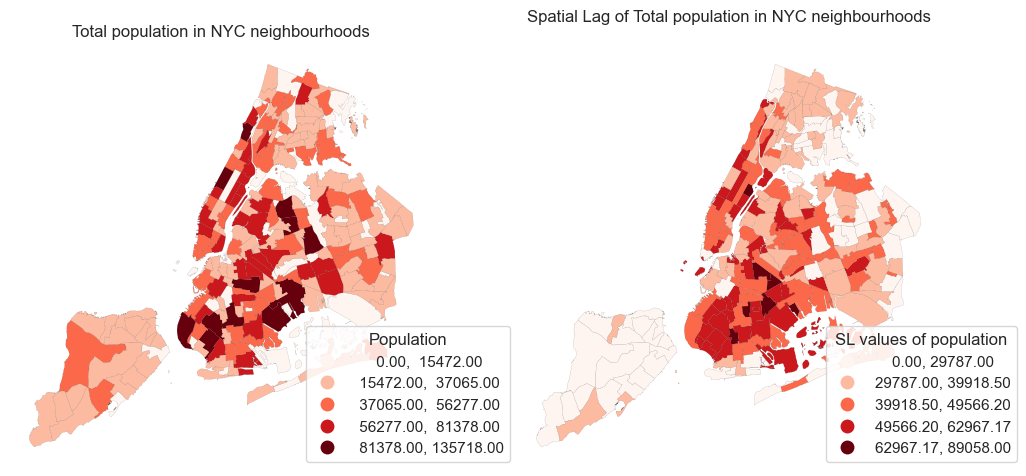
# Plot the original data and spatial lag of the population data for comparison
fig, ax = plt.subplots(1, 2, figsize=(12, 8))
gdf_nyc.plot(column='poptot', ax=ax[0], legend=True, cmap='Reds',
edgecolor='black', linewidth=0.05, scheme = 'naturalbreaks',
legend_kwds = {'bbox_to_anchor': (1.2, 0.35),'title': "Population"})
ax[0].set_title('Total population in NYC neighbourhoods')
gdf_nyc.plot(column='sl_poptop', ax=ax[1], legend=True, cmap='Reds',
edgecolor='black', linewidth=0.05, scheme = 'naturalbreaks',
legend_kwds = {'bbox_to_anchor': (1.2, 0.35),'title': "SL values of population"})
ax[1].set_title('Spatial Lag of Total population in NYC neighbourhoods')
ax[0].set_axis_off()
ax[1].set_axis_off()
plt.show()
The Spatial Lag Model (SLM) is a type of regression model that explicitly includes the effect of neighboring dependent variable values (i.e., spatial lag) on the value at each location:
\(\mathbf{y}\) is the vector of the dependent variable
\(\mathbf{W}\) is the spatial weights matrix, so \(\mathbf{W y}\) is the spatial lag of \(\mathbf{y}\)
\(\rho\) is the spatial autoregressive coefficient
\(\mathbf{X}\) is the matrix of explanatory variables
\(\boldsymbol{\beta}\) is the vector of coefficients
\(\boldsymbol{\epsilon}\) is the error term
# we need to set the crs to EPSG:26917 (NAD83 / UTM zone 17N) as the polygon valus in the data is in this CRS, not the EPSG:4326.
gdf_columbus = gdf_columbus.set_crs(epsg=26917, allow_override=True)
print(gdf_columbus.crs)
EPSG:26917
# Spatial weights
w = weights.Queen.from_dataframe(gdf_columbus, use_index='True')
w.transform = 'R' # Row-standardized
# Variables
y = gdf_columbus[['CRIME']].values # Dependent variable
X = gdf_columbus[['INC', 'HOVAL']].values # Independent variables are Income and House Value.
# Fit spatial lag model
model_sl = ML_Lag(y, X, w=w, name_y='CRIME', name_x=['INC', 'HOVAL'], name_w='Queen', name_ds='Columbus')
# Output summary
print(model_sl.summary)
REGRESSION RESULTS
------------------
SUMMARY OF OUTPUT: MAXIMUM LIKELIHOOD SPATIAL LAG (METHOD = FULL)
-----------------------------------------------------------------
Data set : Columbus
Weights matrix : Queen
Dependent Variable : CRIME Number of Observations: 49
Mean dependent var : 35.1288 Number of Variables : 4
S.D. dependent var : 16.7321 Degrees of Freedom : 45
Pseudo R-squared : 0.6473
Spatial Pseudo R-squared: 0.5806
Log likelihood : -182.6740
Sigma-square ML : 96.8572 Akaike info criterion : 373.348
S.E of regression : 9.8416 Schwarz criterion : 380.915
------------------------------------------------------------------------------------
Variable Coefficient Std.Error z-Statistic Probability
------------------------------------------------------------------------------------
CONSTANT 45.60325 7.25740 6.28369 0.00000
INC -1.04873 0.30741 -3.41154 0.00065
HOVAL -0.26633 0.08910 -2.98929 0.00280
W_CRIME 0.42333 0.11951 3.54216 0.00040
------------------------------------------------------------------------------------
SPATIAL LAG MODEL IMPACTS
Impacts computed using the 'simple' method.
Variable Direct Indirect Total
INC -1.0487 -0.7699 -1.8186
HOVAL -0.2663 -0.1955 -0.4618
================================ END OF REPORT =====================================
In summary, the results reflect the spatial lag model equation, where the spatial autoregressive coefficient \(\rho\) corresponds to the coefficient of W_CRIME (0.42). The vector of regression coefficients \(\boldsymbol{\beta}\) includes the coefficients for INC and HOVAL, which are -1.05 and -0.27 respectively. The error term \(\boldsymbol{\epsilon}\) is represented by the standard error of the regression (9.84) and the maximum likelihood estimate of the error variance (Sigma-square ML = 96.86).
residuals = model_sl.u # residuals from the SLM
moran_resid = esda.Moran(residuals, w)
print(moran_resid.I, moran_resid.p_sim)
0.033068305761995494 0.268
# get the in sample prediction (fttted) crime rates and the residuals
gdf_columbus["fitted"] = model_sl.predy.flatten()
gdf_columbus["residuals"] = model_sl.u.flatten()
2.2.5 Spatial Durbin Model (SDM)#
The Spatial Durbin Model (SDM) is specified as:
where:
\( \mathbf{y} \) is the dependent variable vector,
\( \rho \mathbf{W} \mathbf{y} \) represents the spatial lag of the dependent variable,
\( \mathbf{X} \boldsymbol{\beta} \) are the usual covariates,
\( \mathbf{W} \mathbf{X} \boldsymbol{\theta} \) are the spatially lagged covariates,
\( \boldsymbol{\varepsilon} \sim \mathcal{N}(0, \sigma^2 \mathbf{I}) \) is the error term.
# Fit spatial lag model
model_dur = ML_Lag(y, X, w=w, name_y='CRIME', name_x=['INC', 'HOVAL'], name_w='Queen', name_ds='Columbus',
slx_lags=1,
slx_vars= [True, True])
# Output summary
print(model_dur.summary)
REGRESSION RESULTS
------------------
SUMMARY OF OUTPUT: MAXIMUM LIKELIHOOD SPATIAL LAG WITH SLX - SPATIAL DURBIN MODEL (METHOD = FULL)
-------------------------------------------------------------------------------------------------
Data set : Columbus
Weights matrix : Queen
Dependent Variable : CRIME Number of Observations: 49
Mean dependent var : 35.1288 Number of Variables : 6
S.D. dependent var : 16.7321 Degrees of Freedom : 43
Pseudo R-squared : 0.6603
Spatial Pseudo R-squared: 0.6120
Log likelihood : -181.6393
Sigma-square ML : 93.2722 Akaike info criterion : 375.279
S.E of regression : 9.6578 Schwarz criterion : 386.629
------------------------------------------------------------------------------------
Variable Coefficient Std.Error z-Statistic Probability
------------------------------------------------------------------------------------
CONSTANT 44.32001 13.04547 3.39735 0.00068
INC -0.91991 0.33474 -2.74811 0.00599
HOVAL -0.29713 0.09042 -3.28625 0.00102
W_INC -0.58391 0.57422 -1.01687 0.30921
W_HOVAL 0.25768 0.18723 1.37626 0.16874
W_CRIME 0.40346 0.16133 2.50079 0.01239
------------------------------------------------------------------------------------
DIAGNOSTICS FOR SPATIAL DEPENDENCE
TEST DF VALUE PROB
SPATIAL DURBIN MODEL IMPACTS
Impacts computed using the 'simple' method.
Variable Direct Indirect Total
INC -0.9199 -1.6010 -2.5209
HOVAL -0.2971 0.2310 -0.0661
================================ END OF REPORT =====================================
Geographically Weighted Regression (GWR) and Multiscale Geographically Weighted Regression (MGWR) model can be found at here(click)
Machine learning (ML) workflow
ML tasks in space and time
2.3.1 SVM regression model and hyperpramer using GridSearch + Random CV#
Step 1 Problem definition:
We will use the POI data (X features) to predict the crime levels (y targets) across London grids (1km and 1km) via the machine learning models.
# Load the house price data
gdf_grid = gpd.read_file('data/GEOSTAT_Dec_2011_GEC_in_the_United_Kingdom_2022.geojson')
gdf_grid.head()
| OBJECTID | grd_fixid | grd_floaid | grd_newid | pcd_count | tot_p | tot_m | tot_f | tot_hh | GlobalID | geometry | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 1 | 4.0.31510000.31050000 | 3151.3105.4 | 1kmN3105E3151 | 0 | 0 | 0 | 0 | 0 | c142c42b-5160-4760-a836-956a3920caf8 | POLYGON ((-6.41829 49.87519, -6.41852 49.87527... |
| 1 | 2 | 4.0.31520000.31040000 | 3152.3104.4 | 1kmN3104E3152 | 0 | 0 | 0 | 0 | 0 | 26709ad2-2ae8-4f76-95f4-850c60e9c8e6 | POLYGON ((-6.41461 49.87373, -6.40491 49.87515... |
| 2 | 3 | 4.0.31520000.31050000 | 3152.3105.4 | 1kmN3105E3152 | 0 | 0 | 0 | 0 | 0 | e477a513-48a2-4012-9cd7-3063ac2bc6c6 | POLYGON ((-6.40698 49.8838, -6.40414 49.87568,... |
| 3 | 4 | 4.0.31520000.31060000 | 3152.3106.4 | 1kmN3106E3152 | 0 | 0 | 0 | 0 | 0 | 8d1562d5-3252-40ef-858e-c80391bebefe | POLYGON ((-6.40726 49.88398, -6.42047 49.88204... |
| 4 | 5 | 4.0.31530000.31050000 | 3153.3105.4 | 1kmN3105E3153 | 0 | 0 | 0 | 0 | 0 | 2952357c-da71-4e17-93a0-ace5e73e86d4 | POLYGON ((-6.40414 49.87568, -6.40698 49.8838,... |
# read the London boundary
gdf_london_bound = gpd.read_file('data/whole_london_boundary.geojson')
# to select the Grids in London, we do not use the overlay to clip the shap but use the spatial join to select the grids of London
gdf_london_grid = gpd.sjoin(gdf_grid, gdf_london_bound, how='inner', predicate='intersects')
# drop the index_right column
gdf_london_grid = gdf_london_grid.drop(columns=['index_right'])
# here we only use the gis_osm_pois_free_1.shp file
gdf_poi = gpd.read_file('data/osm_england-latest-free-shp/gis_osm_pois_free_1.shp')
gdf_poi.columns
Index(['osm_id', 'code', 'fclass', 'name', 'geometry'], dtype='object')
# we calculate the numbers and poi type for each grid
df_poi_counts = gdf_poi_grid_s.groupby(['grd_newid']).size().reset_index(name='poi_counts')
df_poi_types = gdf_poi_grid_s.groupby(['grd_newid']).nunique()['fclass'].reset_index(name='poi_types')
# read the crime data
df_crime = pd.read_csv('data/crime_2024_call_police_met_city.csv')
# transfer df to gdf
gdf_crime_s = gpd.GeoDataFrame(df_crime, geometry=gpd.points_from_xy(df_crime['Longitude'], df_crime['Latitude']), crs='EPSG:4326')
# merge the crime data with the grid data
gdf_london_grid_poi_crime = gdf_poi_grid_s_poi_type.merge(df_crime, on='grd_newid', how='left')
# gdf_london_grid_poi_crime.to_file('data/london_grid_poi_crime.geojson', driver='GeoJSON')
Step 3 Data Splitting:
Step 4 Feature Scaling:
Step 5 Model Training and Hyperparameter Tuning (Cross-Validation):
Random CV and GridSearch
gscv_results_df = pd.DataFrame(grid_search.cv_results_)
gscv_results_df
| mean_fit_time | std_fit_time | mean_score_time | std_score_time | param_C | param_epsilon | param_gamma | param_kernel | params | split0_test_score | split1_test_score | split2_test_score | split3_test_score | split4_test_score | mean_test_score | std_test_score | rank_test_score | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 0.011516 | 0.001450 | 0.002091 | 0.000071 | 0.1 | 0.1 | scale | linear | {'C': 0.1, 'epsilon': 0.1, 'gamma': 'scale', '... | -0.161602 | -0.309483 | -0.269594 | -0.213100 | -1.038503 | -0.398456 | 0.323925 | 39 |
| 1 | 0.012661 | 0.000412 | 0.004879 | 0.000386 | 0.1 | 0.1 | scale | rbf | {'C': 0.1, 'epsilon': 0.1, 'gamma': 'scale', '... | -0.178756 | -0.425421 | -0.337690 | -0.235625 | -1.408892 | -0.517277 | 0.453782 | 119 |
| 2 | 0.046547 | 0.011293 | 0.001759 | 0.000071 | 0.1 | 0.1 | scale | poly | {'C': 0.1, 'epsilon': 0.1, 'gamma': 'scale', '... | -0.235991 | -0.381201 | -0.431818 | -0.278688 | -0.515603 | -0.368660 | 0.101424 | 6 |
| 3 | 0.010931 | 0.000872 | 0.001876 | 0.000066 | 0.1 | 0.1 | auto | linear | {'C': 0.1, 'epsilon': 0.1, 'gamma': 'auto', 'k... | -0.161602 | -0.309483 | -0.269594 | -0.213100 | -1.038503 | -0.398456 | 0.323925 | 39 |
| 4 | 0.012968 | 0.002267 | 0.004626 | 0.000337 | 0.1 | 0.1 | auto | rbf | {'C': 0.1, 'epsilon': 0.1, 'gamma': 'auto', 'k... | -0.179099 | -0.424231 | -0.337557 | -0.236367 | -1.408735 | -0.517198 | 0.453636 | 118 |
| ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... |
| 139 | 0.022242 | 0.002893 | 0.002663 | 0.000720 | 100.0 | 0.3 | 0.1 | rbf | {'C': 100, 'epsilon': 0.3, 'gamma': 0.1, 'kern... | -0.189447 | -0.327770 | -0.273917 | -0.211199 | -1.403278 | -0.481122 | 0.463628 | 97 |
| 140 | 0.115625 | 0.023100 | 0.001242 | 0.000179 | 100.0 | 0.3 | 0.1 | poly | {'C': 100, 'epsilon': 0.3, 'gamma': 0.1, 'kern... | -0.228806 | -0.361929 | -0.396099 | -0.261518 | -1.036504 | -0.456971 | 0.296263 | 74 |
| 141 | 0.099460 | 0.013776 | 0.001299 | 0.000078 | 100.0 | 0.3 | 0.01 | linear | {'C': 100, 'epsilon': 0.3, 'gamma': 0.01, 'ker... | -0.169583 | -0.301983 | -0.259901 | -0.212266 | -1.041523 | -0.397051 | 0.325294 | 23 |
| 142 | 0.016670 | 0.004624 | 0.003011 | 0.001341 | 100.0 | 0.3 | 0.01 | rbf | {'C': 100, 'epsilon': 0.3, 'gamma': 0.01, 'ker... | -0.157879 | -0.318991 | -0.271800 | -0.206021 | -1.139578 | -0.418854 | 0.364540 | 64 |
| 143 | 0.014776 | 0.002152 | 0.001799 | 0.000968 | 100.0 | 0.3 | 0.01 | poly | {'C': 100, 'epsilon': 0.3, 'gamma': 0.01, 'ker... | -0.300499 | -0.815115 | -0.488829 | -0.297477 | -2.221372 | -0.824658 | 0.723373 | 137 |
144 rows × 17 columns
# We can generate MSE manually and other performance metrics in the training set
from sklearn.metrics import mean_squared_error, r2_score, mean_absolute_error
# Make predictions on the training set
y_train_pred = best_model.predict(X_train_scaled)
# Calculate performance metrics
mse_train = mean_squared_error(y_train_scaled, y_train_pred)
mae_train = mean_absolute_error(y_train_scaled, y_train_pred)
r2_train = r2_score(y_train_scaled, y_train_pred)
print("Training set performance metrics:")
print("Mean Squared Error (MSE):", mse_train)
print("Mean Absolute Error (MAE):", mae_train)
print("R-squared (R2):", r2_train)
Training set performance metrics:
Mean Squared Error (MSE): 0.3026418555774837
Mean Absolute Error (MAE): 0.3689697950763964
R-squared (R2): 0.6973581444225163
Step 6 Model evaluation and testing:
2.3.2 Evaluating the trained SVR via random CV and Spatial CV#
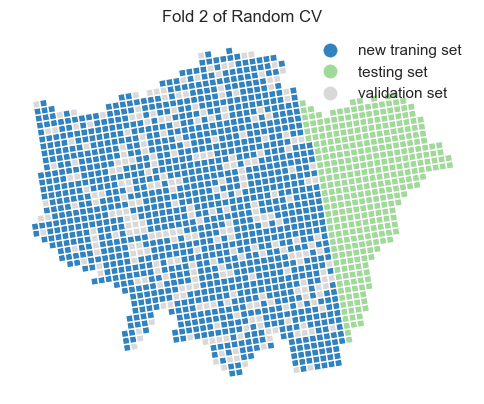
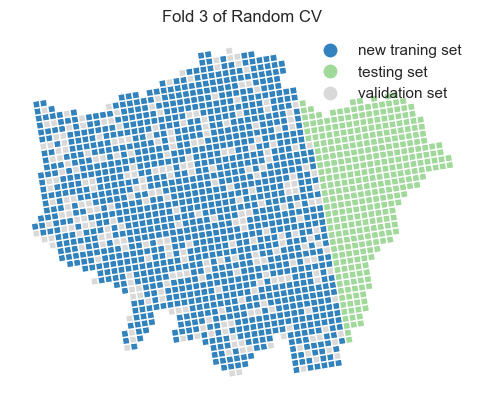
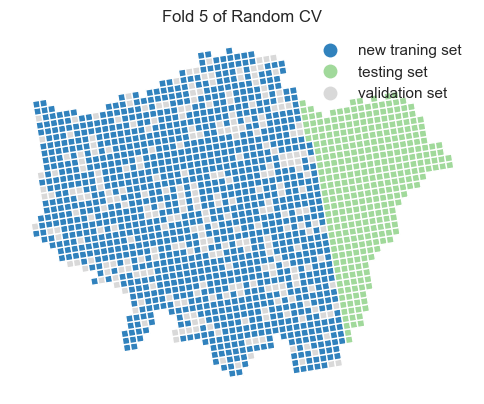
We have previously discussed spatial CV and its importance. Here, the random CV may cause data leakage issues when splitting the original traning data into a new training set (80%) and new test/validation set (20%) from the original training data. We will analyze and compare the differences of trained SVR performance between random CV and spatial CV.
# we integrate the training and validation indices into the gdf for plotting
for i in range(0, 5):
gdf_london_grid_poi_crime[f'index_gr'] = gdf_london_grid_poi_crime.index
gdf_london_grid_poi_crime[f'Fold {i + 1}'] = gdf_london_grid_poi_crime.index_gr.apply(
lambda x: 'new traning set' if x in tr_idx_list[i] else (
'validation set' if x in va_idx_list[i] else 'testing set'))
# we plot the train and test via the index on the grids
fig, ax = plt.subplots(1, 1, figsize=(6, 6))
gdf_london_grid_poi_crime.plot(ax=ax, column=f'Fold {i + 1}', cmap='tab20c', legend=True, figsize=(8, 6),
legend_kwds={'frameon': False})
plt.title(f'Fold {i + 1} of Random CV')
ax.axis('off')
plt.show()


gdf_london_grid_poi_crime_train
| OBJECTID | grd_fixid | grd_floaid | grd_newid | pcd_count | tot_p | tot_m | tot_f | tot_hh | GlobalID | ... | crime_counts | index_gr | Fold 1 | Fold 2 | Fold 3 | Fold 4 | Fold 5 | centroid_x | centroid_y | cluster | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 214289 | 4.0.35930000.32030000 | 3593.3203.4 | 1kmN3203E3593 | 3 | 9 | 5 | 4 | 5 | 9f0c1e1f-e8fa-40ca-a969-d1aedbefa750 | ... | 5.0 | 0 | new traning set | new traning set | validation set | new traning set | new traning set | 503482.732613 | 175573.691920 | 2 |
| 1 | 214290 | 4.0.35930000.32040000 | 3593.3204.4 | 1kmN3204E3593 | 54 | 1957 | 1029 | 928 | 833 | e2530627-9630-4200-ae13-788341456d76 | ... | 13.0 | 1 | new traning set | new traning set | new traning set | new traning set | validation set | 503319.399333 | 176558.376435 | 2 |
| 2 | 214865 | 4.0.35940000.32020000 | 3594.3202.4 | 1kmN3202E3594 | 13 | 445 | 223 | 222 | 169 | bf801f98-5376-4c37-8bcb-d80ae9af1f0b | ... | 0.0 | 2 | new traning set | new traning set | validation set | new traning set | new traning set | 504633.969678 | 174752.667917 | 2 |
| 3 | 214866 | 4.0.35940000.32030000 | 3594.3203.4 | 1kmN3203E3594 | 3 | 34 | 18 | 16 | 11 | 472a8640-40e0-4c94-8eb5-37647847dc99 | ... | 1519.0 | 3 | new traning set | validation set | new traning set | new traning set | new traning set | 504470.650327 | 175737.362096 | 2 |
| 4 | 214867 | 4.0.35940000.32040000 | 3594.3204.4 | 1kmN3204E3594 | 1 | 15 | 9 | 6 | 8 | c21982c0-0d13-43df-8fa5-f77c28fba3d6 | ... | 0.0 | 4 | new traning set | new traning set | new traning set | validation set | new traning set | 504307.315366 | 176722.053398 | 2 |
| ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... |
| 1381 | 233221 | 4.0.36330000.32050000 | 3633.3205.4 | 1kmN3205E3633 | 149 | 17774 | 9897 | 7877 | 4810 | 81df1f73-eabc-432a-96cf-354e3b7e1e58 | ... | 3716.0 | 1381 | new traning set | new traning set | validation set | new traning set | new traning set | 542671.312583 | 184090.897282 | 1 |
| 1382 | 233222 | 4.0.36330000.32060000 | 3633.3206.4 | 1kmN3206E3633 | 138 | 17822 | 9494 | 8328 | 4784 | c5616e02-895d-4669-8768-8357a13dd7f2 | ... | 1345.0 | 1382 | new traning set | validation set | new traning set | new traning set | new traning set | 542507.875127 | 185075.860321 | 1 |
| 1383 | 233223 | 4.0.36330000.32070000 | 3633.3207.4 | 1kmN3207E3633 | 55 | 6018 | 3233 | 2785 | 1854 | 8f730656-d48d-4f99-928b-30cb304f3058 | ... | 861.0 | 1383 | new traning set | new traning set | new traning set | new traning set | validation set | 542344.421880 | 186060.820314 | 1 |
| 1384 | 233224 | 4.0.36330000.32080000 | 3633.3208.4 | 1kmN3208E3633 | 19 | 1544 | 734 | 810 | 529 | 40f56c08-6faf-46f0-b86f-43a4633d560e | ... | 152.0 | 1384 | new traning set | new traning set | new traning set | validation set | new traning set | 542180.952846 | 187045.777269 | 1 |
| 1385 | 233225 | 4.0.36330000.32090000 | 3633.3209.4 | 1kmN3209E3633 | 68 | 4602 | 2308 | 2294 | 1387 | 65b9480d-a4f7-4b82-9731-65080d9b5f31 | ... | 419.0 | 1385 | new traning set | new traning set | validation set | new traning set | new traning set | 542017.468026 | 188030.731192 | 1 |
1386 rows × 24 columns
# use groupcv in sklearn to select the data
from sklearn.model_selection import GroupKFold
# Define the number of splits
n_splits = 5
# Create a GroupKFold object
group_kfold = GroupKFold(n_splits=n_splits)
# Initialize an empty list to store the mean squared errors
g_mse_list = []
# Initialize an empty list to store the training and validation indices
g_tr_idx_list = []
g_va_idx_list = []
# Loop through the splits
for i, (g_train_idx, g_va_idx) in enumerate(
group_kfold.split(X_train_scaled, y_train_scaled, groups=gdf_london_grid_poi_crime_train['cluster'])):
X_tr, X_va = X_train_scaled[g_train_idx], X_train_scaled[g_va_idx]
y_tr, y_va = y_train_scaled[g_train_idx], y_train_scaled[g_va_idx]
model = svm_model.set_params(**{'C': 10, 'epsilon': 0.3, 'gamma': 0.1, 'kernel': 'poly'})
model.fit(X_tr, y_tr.ravel())
preds = model.predict(X_va)
g_mse = mean_squared_error(y_va, preds)
print(f"Fold {i + 1}: MSE = {g_mse:.2f}",
f"Training samples length = {len(train_idx.tolist())},",
f"Validation samples length = {len(va_idx.tolist())}")
g_mse_list.append(g_mse)
print('Mean of mses:', f'{np.mean(g_mse_list):.2f}')
g_tr_idx_list.append(g_train_idx.tolist())
g_va_idx_list.append(g_va_idx.tolist())
Fold 1: MSE = 0.31 Training samples length = 1109, Validation samples length = 277
Mean of mses: 0.31
Fold 2: MSE = 0.36 Training samples length = 1109, Validation samples length = 277
Mean of mses: 0.34
Fold 3: MSE = 0.36 Training samples length = 1109, Validation samples length = 277
Mean of mses: 0.35
Fold 4: MSE = 0.76 Training samples length = 1109, Validation samples length = 277
Mean of mses: 0.45
Fold 5: MSE = 0.24 Training samples length = 1109, Validation samples length = 277
Mean of mses: 0.41
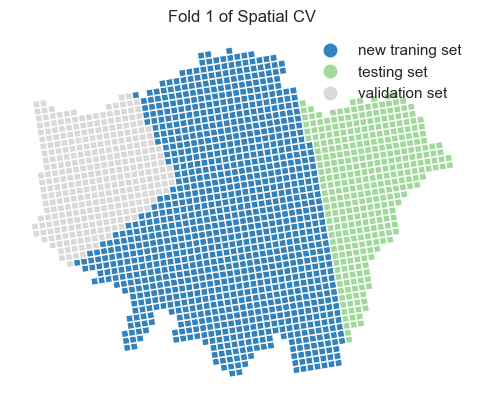
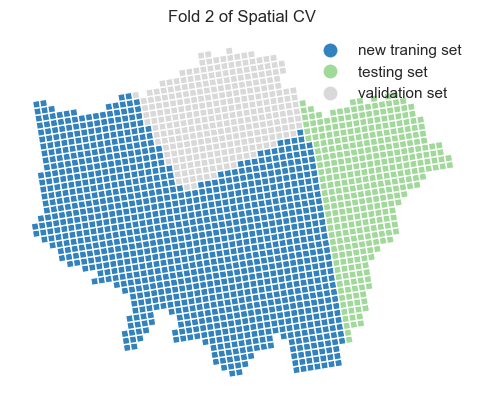
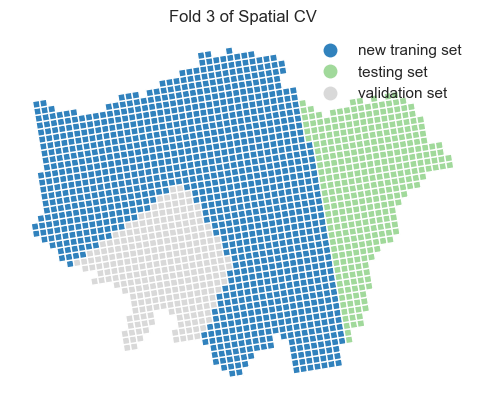
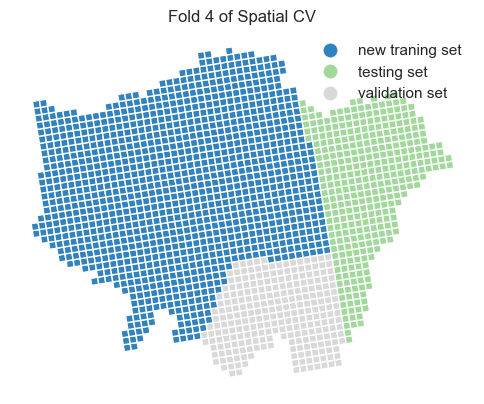
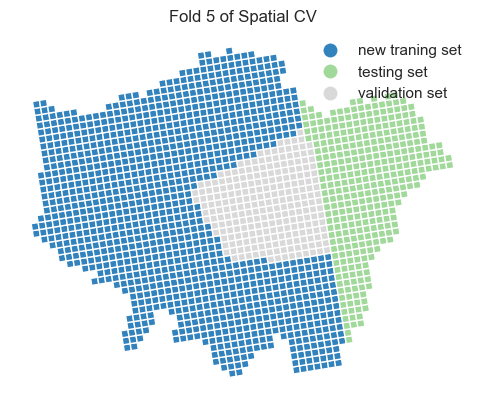
# We integrate the training and validation indices into the gdf for plotting
for i in range(0, 5):
gdf_london_grid_poi_crime[f'index_gr'] = gdf_london_grid_poi_crime.index
gdf_london_grid_poi_crime[f'Group Fold {i + 1}'] = gdf_london_grid_poi_crime.index_gr.apply(
lambda x: 'new traning set' if x in g_tr_idx_list[i] else (
'validation set' if x in g_va_idx_list[i] else 'testing set'))
# we plot the train and test via the index on the grids
fig, ax = plt.subplots(1, 1, figsize=(6, 6))
gdf_london_grid_poi_crime.plot(ax=ax, column=f'Group Fold {i + 1}', cmap='tab20c', legend=True, figsize=(8, 6),
legend_kwds={'frameon': False})
plt.title(f'Fold {i + 1} of Spatial CV')
ax.axis('off')
plt.show()
Two important parameter settings in grid_search.fit() and GridSearchCV():
cv: this should be defined as the group_kfold from the
GroupKFoldgroups: this should be defined as the array/list groups_label from the training set
Hyperparameter via GridSearch and Spatial CV
Training set performance metrics
Testing set performance metrics
We observe that the model’s performance decreases when using spatial cross-validation and grid search compared to the random cross-validation approach. Additionally, the optimal hyperparameters have changed. This suggests that, in the context of spatial prediction, the current model is more robust than the one we previously trained, even though its overall performance appears to be lower.